뿌리변환 = 부모변환 * 부모의 뿌리변환으로 정의하기 때문에 하위 뼈대의 뿌리변환을 얻기 위해서는 부모의 뿌리변환이 반드시 정의되어 있어야한다. 그렇기 때문에 트리를 하향식으로 운영하여 부모의 뿌리변환이 항상 존재하도록 한다. 상향식으로 하게 되면 공통의 조상을 공유하는 뼈대들에 대해 동일한 행렬 곱셈을 중복해서 수행해야 한다.
23.3 정점 혼합
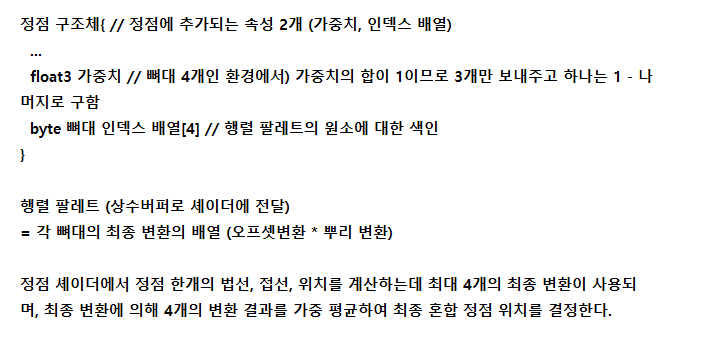
정점 혼합 : 골격을 감싸는 표피의 정점들을 애니메이션 하는 방법을 위한 알고리즘
표피는 연속적인 메시인데 관절 같은 부위의 정점은 표피의 한 정점에 영향을 주는 뼈대가 여러 개일 수 있다. 이 경우 정점의 최종 위치는 영향을 주는 뼈대들의 최종 변환들의 가중 평균으로 결정된다. 이런 방식으로 정점을 혼합하면 관절 주변에서 정점들이 매끄럽게 전이되어서 적당히 탄력있는 모습의 표피가 만들어진다.
3차원 모형을 주변광 항으로만 조명하면 물체 전체에 하나의 색이 고르게 입혀진 모습이 나옴
주변이 얼마나 가려졌는지를 추정하여 차폐도(가려진 정도)를 계산한다.
물체 표면의 점 P에 대한 차폐도를 계산하는 방법 중 하나는 반구에 반직선을 투사(광선 투사)하는 방법이다.
P 중심의 반구에 무작위 반직선을 쏘아서 반구와 교차하지 않는 반직선의 비율을 차폐도로 사용한다.
차폐도가 1에 가까우면 점 P가 거의 가려진 상태라는 뜻이다.
도달도 = accessibility, ambient access
차폐도 = 1 - 도달도
삼각형의 무게중심에서 뻗어나가는 무작위 반직선과 장면 메시(팔진트리 공간)의 교차여부를 확인하여 삼각형의 ambientaccess를 구하고 삼각형을 구성하는 3개의 정점 특성에 ambientAccess 값을 누적하여 저장한다.
삼각형 하나에 반직선대 삼각형 교차 판정이 많이 일어나므로 정적 모형에 대해서는 주변광 차폐를 계산하는 방식이 괜찮을 수 있지만, 애니메이션 되는 모형의 주변광 차폐를 동적으로 계산하는 것은 비현실적이다.
21.2.1 화면 공간 주변광 차폐(SSAO) - 법선과 깊이 렌더링 패스, 주변광 차폐 패스
화면 공간 정보를 이용해서 주변광 차폐를 실시간으로 계산하는 방법
1. 법선과 깊이 렌더링 패스
시야 공간 기준의 법선 벡터를 해상도가 화면 전체인 텍스처에 렌더링한다. (텍스처의 FORMAT이 DXGI_FORMAT_R16G16B16A16_FLOAT)
2. 주변광 차폐 패스
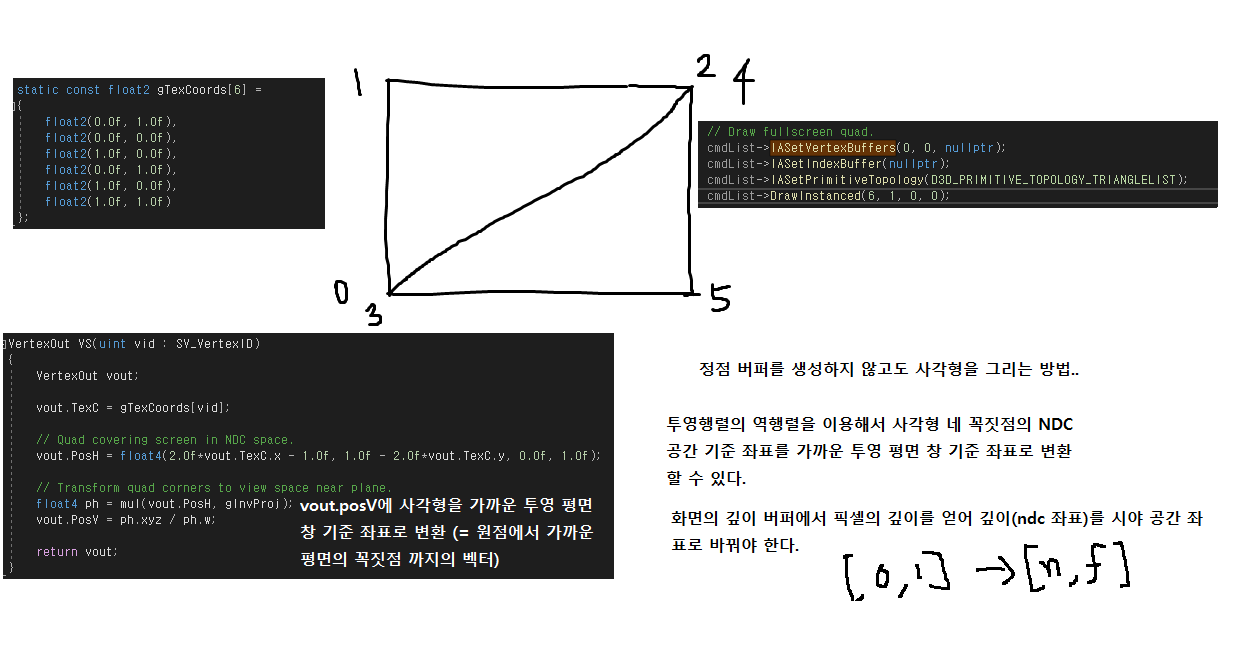
화면 전체를 덮는 사각형 하나(삼각형 두개로 이루어진)을 렌더링해서 화면의 픽셀마다 픽셀 셰이더가 실행되도록 만든다.
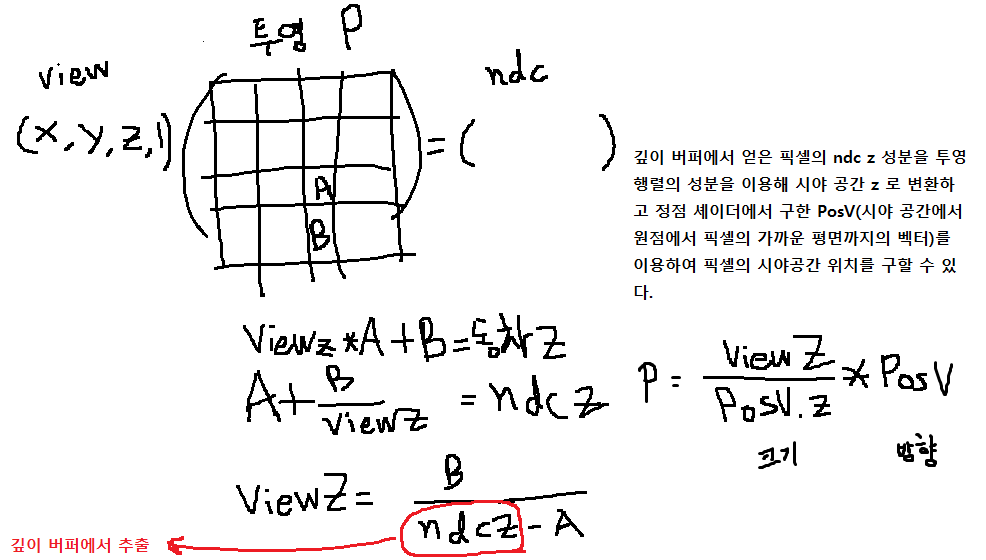
점 P의 시야공간 위치를 구했으면 반구 내부에 존재하는 시야공간의 무작위 표본점(q)의 위치를 구한다.
무작위 표본점 q들을 다시 투영시켜 q의 텍스처 좌표를 구한다. (투영행렬 x 텍스처 행렬)
텍스처 좌표를 사용하여 깊이 맵에서 깊이(NDC)를 추출한다.
표본점 P에 했던 과정(NDC 깊이 -> View 깊이)을 사용하여 q를 향한 반직선에 있는 가장 가까운 가시 픽셀의 깊이를 구한다.
가시 픽셀의 깊이와 q의 깊이의 비율을 이용하여 잠재적 차폐점 r의 시야공간 좌표를 구할 수 있다. (q와 r은 같은 반직선 위에 있으므로)
차폐 판정
1. 시야 공간 깊이 거리 | p.z - r.z |
ㄴ 거리가 최대 거리를 넘어가면 차폐는 없는 것, 최대 거리 이내면 거리에 선형 비례하여 차폐도를 조정한다.
z0은 최소거리, z1은 최대거리
2. p의 법선 벡터와 r - p 벡터의 내적 (둘다 단위 벡터이므로 cosθ)
ㄴ 자기 교차를 방지하는 용도로 쓰인다. 두 벡터가 이루는 각이 90도에 가까우면 r과 p가 같은 평면에 있다는 뜻이므로 차폐도에 영향을 주면 안된다. 코사인 90은 0
두 조건에서 얻은 계수를 곱한 것이 해당 표본에서 얻은 차페도를 뜻하고, 모든 표본의 차폐도를 더한 뒤 표본 개수 (위의 예시에서는 14)로 나누어 평균을 구하면 해당 픽셀에서의 차페도를 구할 수 있다.
도달도를 특정한 지수로 거듭제곱하면 대비(contrast)를 높일 수 있다.
21.2.3 화면 공간 주변광 차폐(SSAO) - 흐리기 패스
적은 표본점으로 만든 차폐도 맵은 잡음이 많다.
표본 수를 늘리면 잡음이 사라지겠지만 실시간 응용 프로그램에서는 성능 때문에 비현실적이다.
SSAO 맵에 가장자리 보존 흐리기 (물체의 가장자리 변들에 대해서는 흐리기를 적용하지 않는다. 가장자리는 법선 맵과 깊이 맵을 이용해서 검출한다) 를 적용한다.
흐려진 SSAO맵을 장면에 적용하는 방법
ㄴ 분산광, 반영광 항에는 적용되면 안되므로 알파 혼합을 사용해서 후면 버퍼를 수정하는 방법은 안된다.
ㄴ SSAO 맵을 셰이더 입력으로 묶어 픽셀 셰이더에서 투영 텍스처 좌표 (투영행렬 x 텍스처 행렬)를 사용하여 SSAO 맵의 표본을 추출해 주변광 계산에 도달도로 사용한다.
SSAO 맵을 사용하여 장면을 그리는 렌더링 패스에서는 깊이 판정을 할 필요가 없으므로 깊이 비교 함수를 Equal로 바꾸면 겹쳐 그리기를 방지 할 수 있다.
가장자리 보존 흐리기
흐리기를 수행할 픽셀의 색상을 계산할 때 흐리기 필터의 크기만큼 표본을 사용하게 되는데, 중앙 픽셀의 법선 벡터와 이웃 픽셀(표본) 의 법선 벡터 사이 각도가 지나치게 크거나 ( 예제에서는 두 벡터의 내적 값 < 0.8f ) 두 픽셀의 깊이 값 차이가 크면 ( 깊이 > 0.2f ) 표본이 불연속 경계에 걸쳐 있는 것으로 간주하여 표본에서 제외시킨다.
물체의 가장자리 픽셀의 흐리기 계산을 하게 된다면 이러한 조건들에 의해 대부분의 표본들이 제외되어 흐리기 과정을 거쳐도 기존 색상을 유지할 확률이 높게 된다.
연습문제
2.
양방향 흐리기 대신 가우스 흐리기를 사용하기 위해 ssaoBlur.hlsl를 수정한다
법선과 깊이의 조건을 무시하고 표본을 모두 사용하게 바꾼다.
가장자리 보존 흐리기가우스 흐리기
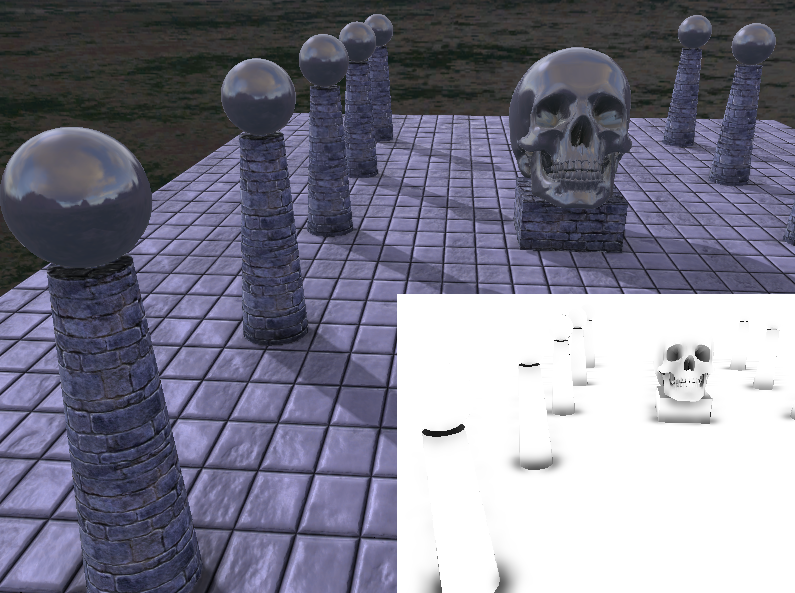
체감이 잘 안되긴 하지만 차폐가 많이 일어나는 경계 부분에서(구 아래 부분) 차이가 난다.
그림자 맵의 해상도가 높을수록 그림자의 품질이 좋지만 장면을 렌더링하는 데 필요한 시간과 그림자 맵을 저장하는 데 필요한 메모리도 늘어난다.
그림자 매핑 알고리즘에는 두 번의 렌더링 패스가 필요하다. 첫 패스에서는 광원의 시점에서 본 장면 깊이를 그림자 맵에 렌더링하고 둘째 패스에서는 카메라에서 본 장면을 후면 버퍼에 렌더링하되, 그림자 맵을 셰이더의 한 입력으로 두어서 그림자 적용 알고리즘을 구현한다.
20.2 직교 투영(Orthographic projection)
물체가 멀리 있을때와 가까이 있을때 같은 크기로 보인다.
직교 투영의 시야 공간을 나타내는 시야 입체(viewing volume)는 절두체 모양이 아니라 직육면체의 형태이다.
원근투영 변환은 투영 행렬로 서술되는 선형변환 부분과 원근 나누기(비선형변환) 으로 구성되는데
직교투영 변환은 전부 선형 변환이다.
직교 투영 행렬
20.3 투영 텍스처 좌표
ㄴ 텍스처를 임의의 기하구조에 투영된 것처럼 보이기 하기 위해 텍스처 좌표를 생성하는 것
광원에 대한
세계 공간 -> 시야 공간 변환 (시야 행렬 V)
시야 공간 -> NDC 공간 변환 (투영 행렬 P) (원근 나누기 포함)
NDC 공간 -> 텍스처 공간 변환 (텍스처 행렬 T)
텍스처 행렬 T
합성변환 VPT는 세계 공간 좌표를 광원 혹은 영사기에 대한 투영 텍스처 좌표로 변환한다.
렌더링 파이프라인의 경우 절두체 바깥에 있는 기하구조는 절단되지만 투영 텍스처 좌표를 생성할 때는 절단이 일어나지 않기 때문에 [u, v] 가 [0, 1]을 벗어나는 좌표는 좌표지정 모드에 따라 작동한다.
직교투영이나 원근투영을 이용하여 투영 텍스처를 적용할 수 있다.
원근 투영 구현의 경우 픽셀 셰이더에서 좌표 값을 w값으로 직접 나눠줘야 (원근 나누기) z값이 [0, 1] 범위가 되지만(NDC) 직교투영은 직교 투영 행렬만 곱해주면 z값 범위가 [0, 1]이 되어 원근 나누기를 해줄 필요가 없다.
20.4 그림자 매핑
그림자 맵
ㄴ광원 시점에서 본 장면 깊이를 텍스처 대상 렌더링 기법을 이용해서 깊이 버퍼에 기록한 것
광원의 시점에서 장면을 렌더링하려면 광원 시야 행렬과 광원의 시야 입체를 정의하는 광원 투영 행렬을 정의해야 한다.
시야 입체는 원근 투영의 경우 절두체 형태이고 직교 투영의 경우 직육면체 형태가 될 수 있다.
20.4.2 편향과 앨리어싱
그림자 맵의 해상도가 유한하기 때문에 그림자 맵의 한 텍셀이 장면의 한 영역에 대응되어 그림자 여드름이라고도 부르는 앨리어싱 문제가 발생한다.
그림자가 없어야 할 곳에 줄무늬 그림자가 나타나는데 이는 그림자 맵 영역 중 장면의 일부 픽셀은 그림자 맵의 깊이보다 깊이가 작기 때문이다.
이에 대한 적절한 해결책은 그림자 맵에 적절한 편향을 더해서 가짜 그림자가 나타나지 않도록 만드는 것이다. 하지만 편향치를 너무 크게 잡으면 그림자와 물체가 분리되어 보이는 현상(피터 팬 효과)가 발생할 수 있기 때문에 기하구조마다 적절한 편향치를 계산하여 적용해야 한다.
기울기 비례 편향 속성 지정은 래스터화 상태 서술에서 지정한다.
1. 고정 편향치
2. 편향치 최대값
3. 기울기 비례계수
깊이 편향치는 래스터화 도중에 (절단 이후에) 적용되므로, 기하구조 절단에는 영향을 미치지 않는다.
20.4.3 비율 근접 필터링 (PCF)
픽셀이 그림자 안에 있는지 판정을 주변 4개의 텍스처 좌표의 깊이 값들로 진행하고, 판정 결과들을 보간한다.
PCF 계산 과정
9번의 SampleCmpLevelZero의 평균값을 사용한다.
셰이더에서 SampleCmpLevelZero 메서드를 통해서 서용할 수 있다. 이 메서드는 통상적인 표본추출기 객체를 사용하지 않고 비교 표본추출기라는 것을 사용한다.
20.4.4 그림자 맵 구축
광원의 시야 행렬(기본 광원으로부터 유도) 과 투영 행렬(광원의 좌표계와 시야 입체를 나타냄)을 정의
시야 입체는 장면 전체를 감싸는 경계구를 이용해서 구함
광원의 시점에서 본 장면을 그림자 맵에 렌더링
mCommandList->OMSetRenderTargets(0, nullptr, false, &mShadowMap->Dsv()); // 장면을 깊이 버퍼에만 렌더링할 것이므로 렌더 대상은 null로 설정한다.
smapPsoDesc.RTVFormats[0] = DXGI_FORMAT_UNKNOWN; smapPsoDesc.NumRenderTargets = 0; // PSO의 렌더 대상 개수를 0으로 지정한다.
20.4.5 그림자 계수
그림자 계수는 [0, 1] 구간의 스칼라 값이다
PCF를 사용하는 경우 점의 일부분만 그림자 안에 있을때 그림자 계수는 [0, 1] 사이의 값이 된다.
정점 셰이더에서 정점 좌표(world)를 투영 텍스처 좌표로 변환하고
픽셀 셰이더에서 원근 나누기를 진행한 뒤 좌표의 z값을 depth(점의 깊이)로 사용하고 x, y값을 그림자 맵에서 깊이 값을 추출하는데 사용한다.